
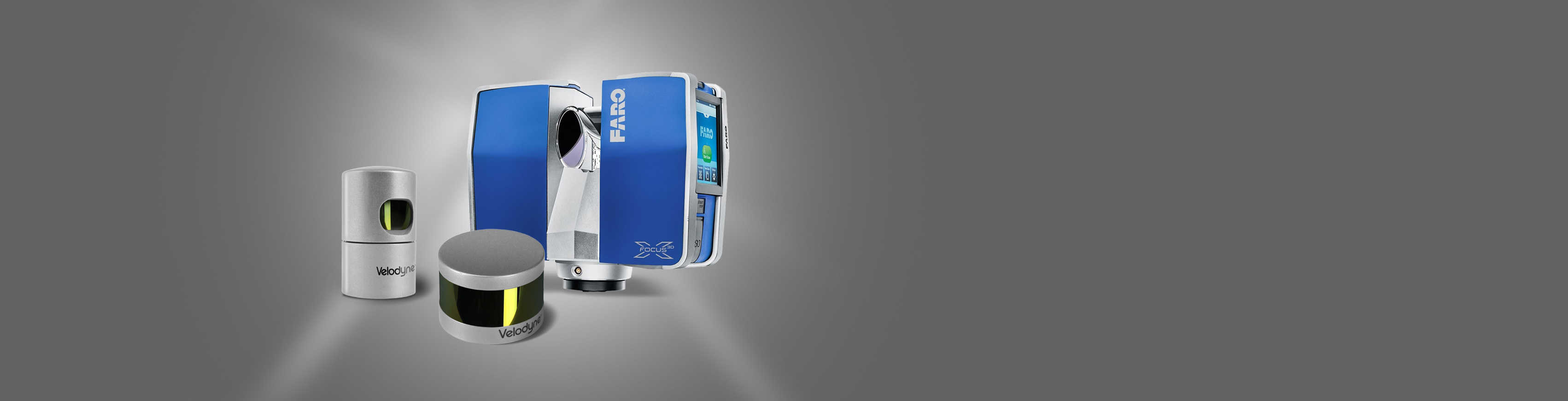
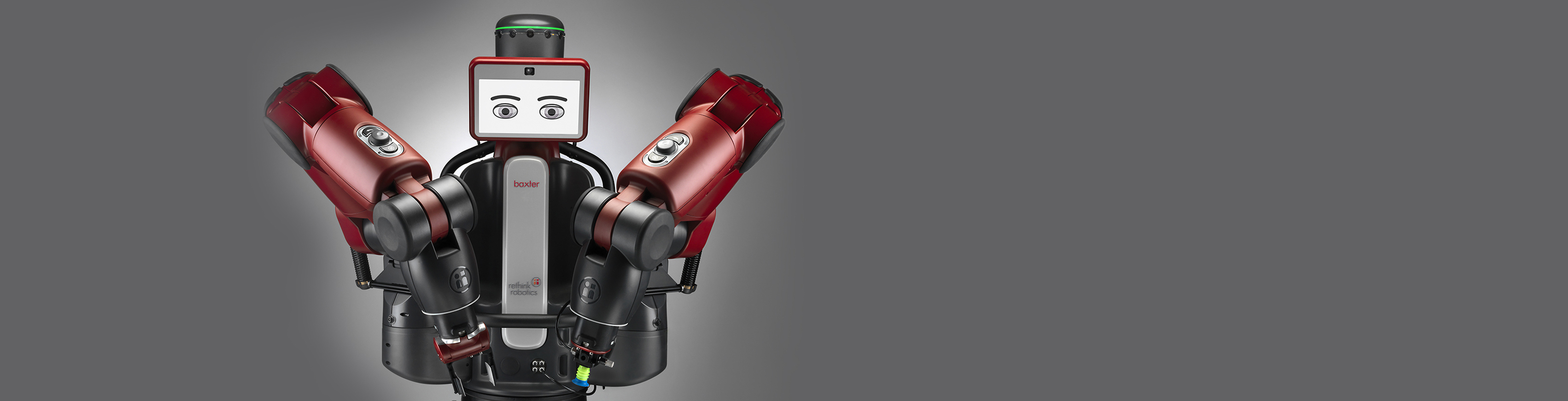
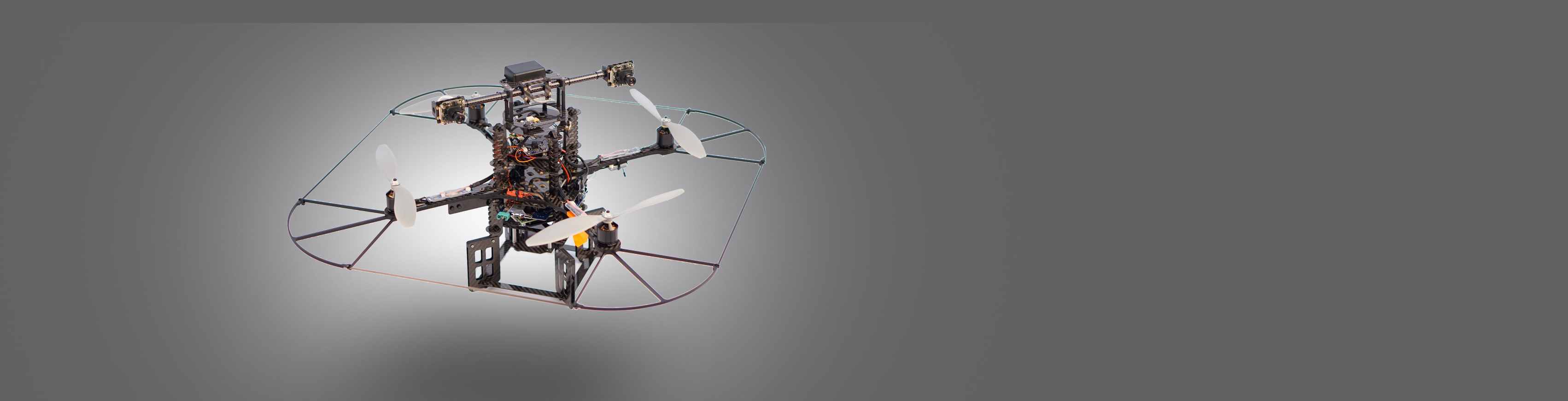
The Laboratory for Autonomous Systems and Mobile Robotics (LAMOR), directed by Prof. Ivan Petrović of the University of Zagreb Faculty of Electrical Engineering and Computing, has a long tradition in research of advanced control strategies and estimation techniques for a variety of applications with a strong emphasis on autonomous navigation of ground and aerial robots in unknown and dynamic environments. Our methodology relies on a strong coupling between theoretical research, algorithm development, experimental evaluations, and a healthy dose of serendipity. LAMOR's research activity is organized around three major axes: Motion Planning and Control, Simultaneous Localization and Mapping, and Detection and Tracking of Moving Objects. Our laboratory is equipped with state-of-the-art ground and aerial robotic platforms, advanced perception sensors and a motion capture covered arena.








